Research Projects
Currently, our research on enabling technologies includes sensors and actuators inspired by biological principles. Experimental applications include medical soft robots, and specifically assistive soft arms for eldercare, as well as robots for monitoring the marine ecosystem. This research relies on multidisciplinary expertise in mechanical design, fabrication technologies, modelling and control.
1. Bioinspired soft robotics
AI-Driven Soft Robots for Marine and Unstructured Environments
Deploying robots in marine environments demands compliance, energetic efficiency, and ecological responsibility. This project develops underwater soft robots that are bioinspired, biodegradable, and AI-driven. Locomotion and grasping principles drawn from aquatic organisms will exploit embodied intelligence to minimize their energy consumption while enabling long-endurance operation. The robot body will be constructed from biodegradable materials, engineered to degrade harmlessly at its end of life, eliminating ecological impact. Critically, fundamentally new control paradigms will be explored that evolve with evolving robotic behaviors.
.svg)
Project Timeline
Start Date: 09/2025
End Date: 08/2027
.svg)
People

Kan Longxin

QIN Zhihang

LI Keyi

Muhammad Sunny Nazeer
.svg)
Funding Agencies
.svg)
Publications :
Lo Preti, M., Nazeer, M.S., Pinskier, J., Howard, D. and Laschi, C., 2026. Design-for-benchmarking in soft robotics: Navigating component–system dichotomy. Advanced Intelligent Systems. https://doi.org/10.1002/aisy.202600002
Qin, Z., Zhang, Y., Su, W., Hou, L., Zhou, S., Chen, Z., Tan, Y.J. and Laschi, C., 2025. Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping. arXiv preprint arXiv:2511.03691.
Hou, L., Wu, Q., Qin, Z., Banerjee, N., Guo, Y. and Laschi, C., 2025. A Quantitative Comparison of Centralised and Distributed Reinforcement Learning-Based Control for Soft Robotic Arms. arXiv preprint arXiv:2511.02192.
The project targets the development of reasoning-grounded, adaptive control for modular soft robotic systems. It addresses three parallel and mutually benefitting research areas: (a) establishing benchmarking foundations for the soft robotics field in general, (b) designing and simulating new pneumatically actuated modular soft robotic platforms, and (c) implementing and critically evaluating meta learning frameworks for adaptive soft robot control. Together, the research presents complementary and critical preliminary findings for future competitive projects on novel cognition-grounded soft robot control with an express target of human-centric use-inspired soft robotic control.
Project Timeline
Start Date: 03/2025
End Date: 02/2027
People
Muhammad Sunny Nazeer
Funding Agencies
.svg)
Grant Number :
R22I0IR124
Publications
Lo Preti, M., Nazeer, M.S., Pinskier, J., Howard, D. and Laschi, C., 2026. Design-for-benchmarking in soft robotics: Navigating component–system dichotomy. Advanced Intelligent Systems. https://doi.org/10.1002/aisy.202600002
DESTRO - Dextrous, strong yet soft robots
An ITALY – SINGAPORE SCIENCE AND TECHNOLOGY COOPERATION aimed at studying muscular hydrostats. Muscular hydrostats work inside (e.g., octopus arms) and outside (e.g., elephant trunks) water, but nature evolved different muscular structures for the different environments. This project aims to comparatively unveil the key principles of muscular hydrostats, for robotics purposes. We include biological studies and advanced modeling techniques, and we rely on the soft robotics technologies and materials available at the institutions in Singapore and Italy for comparatively testing robotic muscular hydrostats. A soft arm prototype will be used for a joint study on its use, taking advantage of a teleoperation platform available in Singapore. Thanks to the expertise of teams in Italy and Singapore on related neuroscience, the study will focus on how a human brain can control a soft arm with completely different shape and dexterity.
Project Timeline
Start Date: 7/1/2023
End Date: 6/30/2026
People

Cecilia LASCHI

Yiyuan ZHANG

Yuchen SUN

Linxin HOU
QIN Zhihang
%20Cropped.jpg)
Huishi HUANG
Funding Agencies
Publications
Zhang, C., Zhang, Y., Ye, Y., Chen, J., Wang, H. and Laschi, C., 2026. Unified Structural-Hydrodynamic Modeling of Underwater Underactuated Mechanisms and Soft Robots. arXiv preprint arXiv:2603.07939.
Huang, H., Klusmann, J., Wang, H., Ji, S., Ying, F., Zhang, Y., Nassour, J., Cheng, G., Rus, D., Liu, J., Ang Jr, M.H. and Laschi, C. (2026). Physical Human-Robot Interaction for Grasping in Augmented Reality via Rigid-Soft Robot Synergy. arXiv preprint arXiv:2602.17128. [Accepted for RoboSoft 2026].
Agabiti, C., Donato, E., Setti, E., Dagenais, P., Milinkovitch, M.C., Laschi, C., Sabatini, A.M., Mazzolai, B. and Falotico, E., 2026. Stereotypical force patterns of the elephant trunk in planar reaching movements. iScience, 29(4).
Lo Preti, M., Nazeer, M.S., Pinskier, J., Howard, D. and Laschi, C., 2026. Design-for-benchmarking in soft robotics: Navigating component–system dichotomy. Advanced Intelligent Systems. https://doi.org/10.1002/aisy.202600002
Somma, D., Bianchi, D., Iori, F., Laschi, C. and Falotico, E., 2026. Hand-Guided Human-Robot Interaction with a Learning-Based Controller for Soft Robot Arms. IEEE ACCESS, pp.1-1.
Qin, Z., Zhang, Y., Su, W., Hou, L., Zhou, S., Chen, Z., Tan, Y.J. and Laschi, C., 2025. Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping. arXiv preprint arXiv:2511.03691.
Hou, L., Wu, Q., Qin, Z., Banerjee, N., Guo, Y. and Laschi, C., 2025. A Quantitative Comparison of Centralised and Distributed Reinforcement Learning-Based Control for Soft Robotic Arms. arXiv preprint arXiv:2511.02192.
Zhang, S., Zhang, Y., Zhang, C., Li, Y., Xin, W., Liufu, Y., Ng, H.W. and Laschi, C., 2025. Octopus-like Reaching Motion: A Perspective Inspired by Whipping. arXiv preprint arXiv:2510.25520.
Wang, Peiyi, Zhexin Xie, Wenci Xin, Zhiqiang Tang, Xinhua Yang, Muralidharan Mohanakrishnan, Sheng Guo, and Cecilia Laschi. “Sensing Expectation Enables Simultaneous Proprioception and Contact Detection in an Intelligent Soft Continuum Robot.” Nature Communications 15, no. 1 (2024): 9978.
2. Assistive soft robotics
M3S - Mens, Manus and Machina
An interdisciplinary program of SMART, MIT’s research enterprise in Singapore, aimed to study the introduction of AI and robots in the society. The research at M3S addresses critical questions concerning the design of technology, the development of human skills, and the adaptation of institutions and social structures to effectively navigate the transformative impact of AI, automation, and robotics.
About M3S | SMART| Singapore (mit.edu)
Project Timeline
Start Date: 7/1/2023
End Date: 6/30/2028
Funding Agencies
Publications
Song, Y., Li, W., Xin, W., Tang, Z., Rus, D. and Laschi, C., 2026. Shape Control of a Planar Hyper-Redundant Robot via Hybrid Kinematics-Informed and Learning-based Approach. arXiv preprint arXiv:2603.10402.
Zhang, C., Zhang, Y., Ye, Y., Chen, J., Wang, H. and Laschi, C., 2026. Unified Structural-Hydrodynamic Modeling of Underwater Underactuated Mechanisms and Soft Robots. arXiv preprint arXiv:2603.07939.
Huang, H., Klusmann, J., Wang, H., Ji, S., Ying, F., Zhang, Y., Nassour, J., Cheng, G., Rus, D., Liu, J. and Ang Jr, M.H., 2026. Physical Human-Robot Interaction for Grasping in Augmented Reality via Rigid-Soft Robot Synergy. arXiv preprint arXiv:2602.17128.
Wang, P., Feliu-Talegon, D., Sun, Y., Xie, Z., Xin, W., Nazeer, M.S., Della Santina, C., Laschi, C. and Renda, F., 2026. Strain-based Shape and 3D Force Estimation for Rod-driven Continuum Robots with Stretch Sensors. IEEE Transactions on Robotics.
Tang, Z., Tian, L., Xin, W., Wang, Q., Rus, D. and Laschi, C., 2026. A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations. Science Advances, 12(2), p.eaea3712.
Wang, C., Zhang, Y., Tang, A., Zeng, Z., Chen, H., Gao, Q., Zhuang, Z., Li, B., Xiong, Z., Zhang, A. and Hao, C., 2026. Soft Responsive Materials Enhance Humanoid Safety. arXiv preprint arXiv:2601.02857.
Wang, P., Lefeuvre, P.A., Zou, S., Ni, Z., Rus, D. and Laschi, C., 2025. Adaptive and Multi-object Grasping via Deformable Origami Modules. arXiv preprint arXiv:2511.00516.
Completed Research Projects
REBOT - Rethinking underwater robot manipulation:
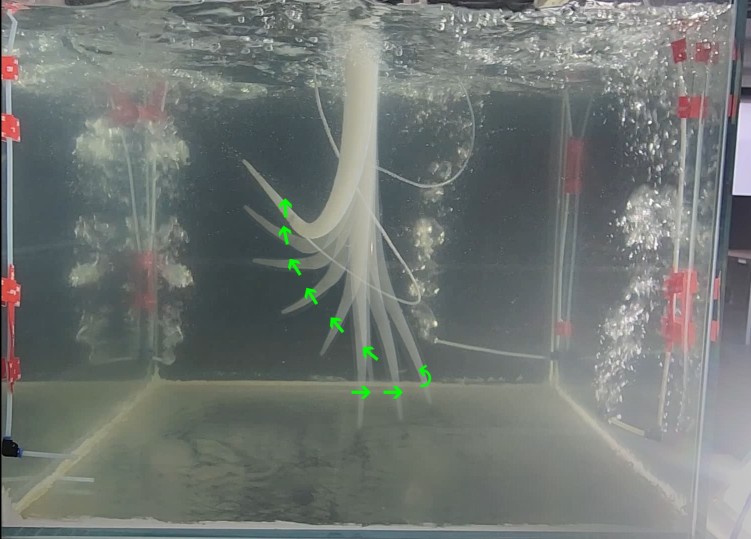
REBOT aims to demonstrate that octopus-inspired strategies are more efficient for manipulation in water. We aim at first demonstrating it mathematically, with models and simulations. Then we test our findings ecperimentally with an octopus-inspired soft robot arm.Our results can bring a revolutionary impact on underwater robotics, by providing efficient and effective grasping strategies that can increase underwater robot adoption.Possible applications span from off-shore industry to biology and oceanography.
Project Timeline
Start Date: 8/1/2022
End Date: 7/31/2025
People
Cecilia LASCHI
Yiyuan ZHANG
Yuchen SUN
Linxin HOU
QIN Zhihang

Adamya Singh DHAKER

Ng Hong Wei

Sharun Arumugam
Funding Agency

Funded by Singapore Ministry of Education (MOE), Tier 2 Grant.
Grant Number:
Moe-t2eP50221-0010
Publications
Zhang, C., Zhang, Y., Ye, Y., Chen, J., Wang, H. and Laschi, C., 2026. Unified Structural-Hydrodynamic Modeling of Underwater Underactuated Mechanisms and Soft Robots. arXiv preprint arXiv:2603.07939.
Qin, Z., Zhang, Y., Su, W., Hou, L., Zhou, S., Chen, Z., Tan, Y.J. and Laschi, C., 2025. Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping. arXiv preprint arXiv:2511.03691.
Hou, L., Wu, Q., Qin, Z., Banerjee, N., Guo, Y. and Laschi, C., 2025. A Quantitative Comparison of Centralised and Distributed Reinforcement Learning-Based Control for Soft Robotic Arms. arXiv preprint arXiv:2511.02192.
Zhang, S., Zhang, Y., Zhang, C., Li, Y., Xin, W., Liufu, Y., Ng, H.W. and Laschi, C., 2025. Octopus-like Reaching Motion: A Perspective Inspired by Whipping. arXiv preprint arXiv:2510.25520.
Zhang, S., Zhang, Y., Zhang, C., Li, Y., Xin, W., Liufu, Y., Ng, H.W. and Laschi, C., 2025. Octopus-like Reaching Motion: A Perspective Inspired by Whipping. arXiv preprint arXiv:2510.25520.
Wang, Peiyi, Zhexin Xie, Wenci Xin, Zhiqiang Tang, Xinhua Yang, Muralidharan Mohanakrishnan, Sheng Guo, and Cecilia Laschi. “Sensing Expectation Enables Simultaneous Proprioception and Contact Detection in an Intelligent Soft Continuum Robot.” Nature Communications 15, no. 1 (2024): 9978.
Tan, Yu Jun, Gianmarco Mengaldo, and Cecilia Laschi. “Artificial Muscles for Underwater Soft Robots: Materials and Their Interactions.” Annual Review of Condensed Matter Physics 15, no. Volume 15, 2024 (2024)
Xie, Zhexin, Feiyang Yuan, Jiaqi Liu, Lufeng Tian, Bohan Chen, Zhongqiang Fu, Sizhe Mao, et al. “Octopus-Inspired Sensorized Soft Arm for Environmental Interaction.” Science Robotics 8, no. 84 (2023): eadh7852.
Mengaldo, Gianmarco, Federico Renda, Steven L. Brunton, Moritz Bächer, Marcello Calisti, Christian Duriez, Gregory S. Chirikjian, and Cecilia Laschi. “A Concise Guide to Modelling the Physics of Embodied Intelligence in Soft Robotics.” Nature Reviews Physics 4, no. 9 (2022)
RoboLife – Soft robots with morphological adaptation and life-like abilities:
We take a bioinspired approach to investigate abilities that robots do not have yet, leveraging on the potential of soft robotics technologies. We mostly address marine species and the benthic area, to create robots with different locomotion patterns, new forms of grasping and manipulation, shape adaptation. They have potential to accomplish diverse tasks of exploration of benthic areas and intervention in industrial plants, e.g., monitoring, sampling, maintenance, others.
Project Timeline
Start Date: 4/1/2021
End Date: 3/31/2025
People
Cecilia LASCHI

WANG Peiyi

Wenci XIN

KAN Longxin
Huishi HUANG

Yuanyuan LI

KOH Hui Fang
Muhammad Sunny Nazeer

Matteo Lo Preti
Funding Agency
Publications
Wang, P., Feliu-Talegon, D., Sun, Y., Xie, Z., Xin, W., Nazeer, M.S., Della Santina, C., Laschi, C. and Renda, F., 2026. Strain-based Shape and 3D Force Estimation for Rod-driven Continuum Robots with Stretch Sensors. IEEE Transactions on Robotics.
Wang, J., Du, P., Zhang, Y., Xie, Z. and Laschi, C., 2026. From shallow waters to Mariana Trench: A survey of bio-inspired underwater soft robots. Bioinspiration & Biomimetics.
Li, Y., Qu, Y., Zhang, X., Zhang, Q., Feng, J., Cai, J. and Laschi, C., 2026. Earwig wing-inspired bistable origami: non-Euclidean units with soft joints. Bioinspiration & Biomimetics, 21(1), p.016001.
D’Angelo, G., Pedersen, J.E., Hassan, T., Cianchetti, M., Bongard, J., Iida, F., Indiveri, G., Hoffmann, M., Laschi, C., De Luca, C. and Bartolozzi, C., 2026. A benchmarking framework for embodied neuromorphic agents. Nature Machine Intelligence, pp.1-13.
Hou, L., Wu, Q., Qin, Z., Banerjee, N., Guo, Y. and Laschi, C., 2025. A Quantitative Comparison of Centralised and Distributed Reinforcement Learning-Based Control for Soft Robotic Arms. arXiv preprint arXiv:2511.02192.
Mazzolai, B., Del Dottore, E., Speck, T., Rowe, N. and Laschi, C., 2025. Energy-saving movement strategies in animals and plants for robot design. Nature Reviews Bioengineering, 3(11), pp.921-938.
Zhang, S., Zhang, Y., Zhang, C., Li, Y., Xin, W., Liufu, Y., Ng, H.W. and Laschi, C., 2025. Octopus-like Reaching Motion: A Perspective Inspired by Whipping. arXiv preprint arXiv:2510.25520.
Li, X., Xiao, X., Xiao, X., Liu, Z., Gong, J., Lin, Z., Xue, B., Liu, S., Wu, X., Zhang, W. and Wang, D., 2025. Magnetic field–enhanced vertical integration enables embodied intelligence in untethered soft robots. Science Advances, 11(37), p.eadv9572.
Ni, Z., Xu, C., Qin, Z., Zhang, C., Tang, Z., Wang, P. and Laschi, C., 2025. Origami-Inspired Soft Gripper with Tunable Constant Force Output. arXiv preprint arXiv:2503.01481.
Tan, Yu Jun, Gianmarco Mengaldo, and Cecilia Laschi. “Artificial Muscles for Underwater Soft Robots: Materials and Their Interactions.” Annual Review of Condensed Matter Physics 15, no. Volume 15, 2024 (2024): 45–61.
Wang, Peiyi, Zhexin Xie, Wenci Xin, Zhiqiang Tang, Xinhua Yang, Muralidharan Mohanakrishnan, Sheng Guo, and Cecilia Laschi. “Sensing Expectation Enables Simultaneous Proprioception and Contact Detection in an Intelligent Soft Continuum Robot.” Nature Communications 15, no. 1 (2024): 9978.
Xie, Zhexin, Feiyang Yuan, Jiaqi Liu, Lufeng Tian, Bohan Chen, Zhongqiang Fu, Sizhe Mao, et al. “Octopus-Inspired Sensorized Soft Arm for Environmental Interaction.” Science Robotics 8, no. 84 (2023): eadh7852.
Xin, Wenci, Fangmeng Zhu, Peiyi Wang, Zhexin Xie, Zhiqiang Tang, and Cecilia Laschi. “Electrical Impedance Tomographic Shape Sensing for Soft Robots.” IEEE Robotics and Automation Letters 8, no. 3 (2023): 1555–62.
Mengaldo, Gianmarco, Federico Renda, Steven L. Brunton, Moritz Bächer, Marcello Calisti, Christian Duriez, Gregory S. Chirikjian, and Cecilia Laschi. “A Concise Guide to Modelling the Physics of Embodied Intelligence in Soft Robotics.” Nature Reviews Physics 4, no. 9 (2022): 595–610.
Laschi, Cecilia. “The Physics of Interactions in Soft Robotics.” In APS March Meeting Abstracts, 2022:K03-001, 2022.
CARTIN - Center for Advanced Robotics Technology Innovation
An NRF Medium-Size Center, established in March 2021 and funded for 5 years.At NUS, we investigate robots for eldercare and the Soft Robotics Lab contributes with assistive soft robots designed after our users' need.
At NUS, we aim at answering the following question: Can robots help with the growing need for assistance to our ageing citizens? We believe that assistive robots can help seniors have a longer active life. We adopt a user-centred design (UCD) approach to ensure that we respond to the needs of elderly and caregivers, and ultimately promote a wide adoption of robots.
Read more about CARTIN ->
Project Timeline
Start Date: 3/30/2021
End Date: 3/29/2026
People
Cecilia LASCHI

Muralidharan Mohanakrishnan

Zhexin XIE

Zhiqiang TANG
LI Keyi

Elham Azadfar
Funding Agency
Publications
Tang, Z., Tian, L., Xin, W., Wang, Q., Rus, D. and Laschi, C., 2026. A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations. Science Advances, 12(2), p.eaea3712.
Wang, P., Feliu-Talegon, D., Sun, Y., Xie, Z., Xin, W., Nazeer, M.S., Della Santina, C., Laschi, C. and Renda, F., 2026. Strain-based Shape and 3D Force Estimation for Rod-driven Continuum Robots with Stretch Sensors. IEEE Transactions on Robotics.
Relaño Gibert, C., Tang, Z., Laschi, C. and Monje Micharet, C.A., 2025. A Novel Enhanced Methodology for Position and Orientation Control of the I-SUPPORT Robot.
Ni, Z., Xu, C., Qin, Z., Zhang, C., Tang, Z., Wang, P. and Laschi, C., 2025. Origami-Inspired Soft Gripper with Tunable Constant Force Output. arXiv preprint arXiv:2503.01481.
Tang, Zhiqiang, Wenci Xin, Peiyi Wang, and Cecilia Laschi. “Learning-Based Control for Soft Robot–Environment Interaction with Force/Position Tracking Capability.” Soft Robotics, February 20, 2024.
Wang, Peiyi, Zhexin Xie, Wenci Xin, Zhiqiang Tang, Xinhua Yang, Muralidharan Mohanakrishnan, Sheng Guo, and Cecilia Laschi. “Sensing Expectation Enables Simultaneous Proprioception and Contact Detection in an Intelligent Soft Continuum Robot.” Nature Communications 15, no. 1 (2024): 9978.
Tang, Zhiqiang, Peiyi Wang, Wenci Xin, Zhexin Xie, Longxin Kan, Muralidharan Mohanakrishnan, and Cecilia Laschi. “Meta-Learning-Based Optimal Control for Soft Robotic Manipulators to Interact with Unknown Environments.” In 2023 IEEE International Conference on Robotics and Automation (ICRA), 982–88. London, United Kingdom: IEEE, 2023.
Xie, Zhexin, Muralidharan Mohanakrishnan, Peiyi Wang, Jiaqi Liu, Wenci Xin, Zhiqiang Tang, Li Wen, and Cecilia Laschi. “Soft Robotic Arm With Extensible Stiffening Layer.” IEEE Robotics and Automation Letters 8, no. 6 (2023): 3597–3604.
Xin, Wenci, Fangmeng Zhu, Peiyi Wang, Zhexin Xie, Zhiqiang Tang, and Cecilia Laschi. “Electrical Impedance Tomographic Shape Sensing for Soft Robots.” IEEE Robotics and Automation Letters 8, no. 3 (2023): 1555–62.
Wang, Peiyi, Zhiqiang Tang, Wenci Xin, Zhexin Xie, Sheng Guo, and Cecilia Laschi. “Design and Experimental Characterization of a Push-Pull Flexible Rod-Driven Soft-Bodied Robot.” IEEE Robotics and Automation Letters 7, no. 4 (2022): 8933–40.
Mengaldo, Gianmarco, Federico Renda, Steven L. Brunton, Moritz Bächer, Marcello Calisti, Christian Duriez, Gregory S. Chirikjian, and Cecilia Laschi. “A Concise Guide to Modelling the Physics of Embodied Intelligence in Soft Robotics.” Nature Reviews Physics 4, no. 9 (2022): 595–610.
Wang, J., Du, P., Zhang, Y., Xie, Z. and Laschi, C., 2026. From shallow waters to Mariana Trench: A survey of bio-inspired underwater soft robots. Bioinspiration & Biomimetics.
.svg)
Collaborators
Soft and Hybrid Phase 2a (complete)
Project Timeline
Start Date: 1/7/2021
End Date: 31/10/2022
People
Cecilia LASCHI
Zhiqiang TANG

Wenci XIN
WANG Peiyi
Funding Agency
Publications
Wang, P., Feliu-Talegon, D., Sun, Y., Xie, Z., Xin, W., Nazeer, M.S., Della Santina, C., Laschi, C. and Renda, F., 2026. Strain-based Shape and 3D Force Estimation for Rod-driven Continuum Robots with Stretch Sensors. IEEE Transactions on Robotics.
Tang, Z., Tian, L., Xin, W., Wang, Q., Rus, D. and Laschi, C., 2026. A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations. Science Advances, 12(2), p.eaea3712.
Ni, Z., Xu, C., Qin, Z., Zhang, C., Tang, Z., Wang, P. and Laschi, C., 2025. Origami-Inspired Soft Gripper with Tunable Constant Force Output. arXiv preprint arXiv:2503.01481.
Tang, Zhiqiang, Wenci Xin, Peiyi Wang, and Cecilia Laschi. “Learning-Based Control for Soft Robot–Environment Interaction with Force/Position Tracking Capability.” Soft Robotics, February 20, 2024.
Tang, Zhiqiang, Peiyi Wang, Wenci Xin, Zhexin Xie, Longxin Kan, Muralidharan Mohanakrishnan, and Cecilia Laschi. “Meta-Learning-Based Optimal Control for Soft Robotic Manipulators to Interact with Unknown Environments.” In 2023 IEEE International Conference on Robotics and Automation (ICRA), 982–88. London, United Kingdom: IEEE, 2023.
Xin, Wenci, Fangmeng Zhu, Peiyi Wang, Zhexin Xie, Zhiqiang Tang, and Cecilia Laschi. “Electrical Impedance Tomographic Shape Sensing for Soft Robots.” IEEE Robotics and Automation Letters 8, no. 3 (March 2023): 1555–62.
Tang, Zhiqiang, Peiyi Wang, Wenci Xin, and Cecilia Laschi. “Learning-Based Approach for a Soft Assistive Robotic Arm to Achieve Simultaneous Position and Force Control.” IEEE Robotics and Automation Letters 7, no. 3 (July 2022): 8315–22.