
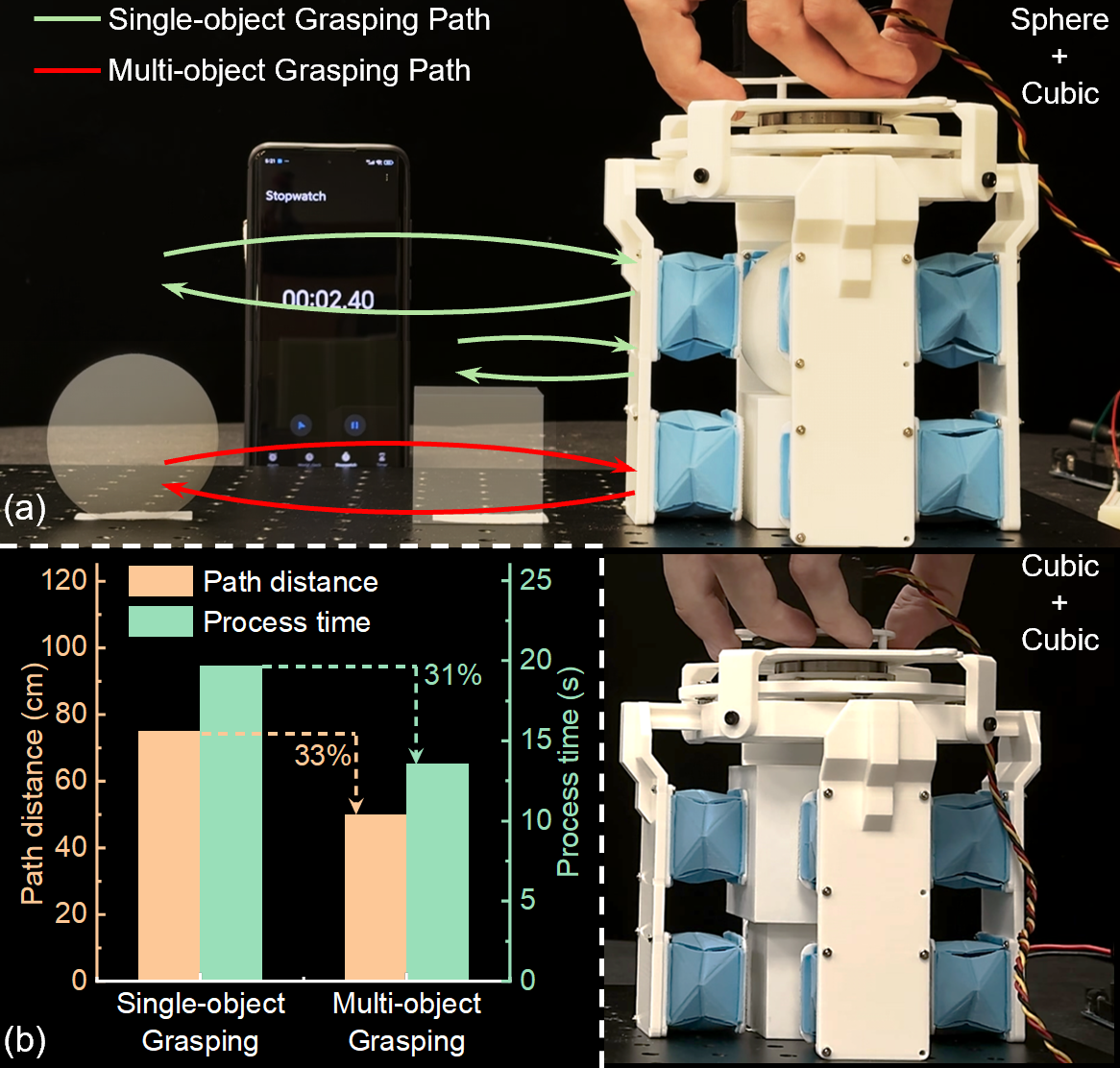
1. Adaptive Multi-Object Grasping with Origami Soft Modules
A soft origami-module gripper enabling adaptive and multi-object grasping in a single operation, improving manipulation efficiency through programmed mechanics.
Funding : Supported by the SMART M3S program.
Adaptive Multi-Object Grasping with Origami Soft Modules
2. A quantitative comparison of centralized and distributed reinforcement learning-based control for soft robotic arms
The work focuses on reinforcement learning-based control for soft robotic arms. The work quantitatively compares centralised and distributed learning architectures and shows the advantages of distributed control for robustness and scalability in complex soft robotic systems.
Funding : This work was supported by the Start-up grant RoboLife, DESTRO, ITALY–SINGAPORE grant (MAE and A*STAR), and Bridging fund (AI-Driven Soft Robots for Marine and Unstructured Environments).

A quantitative comparison of centralized and distributed reinforcement learning-based control for soft robotic arms
3. Is Octopus Reaching Simply a Whip-Like Motion?
We investigate whether octopus reaching can be explained by passive whipping. While whip-like dynamics can reproduce bend propagation, they fail to generate the characteristic bell-shaped velocity profile of biological reaching, highlighting the essential role of fluid interaction and active control.
Funding : Funding comes from SMART, M3S.

Is Octopus Reaching Simply a Whip-Like Motion?
4. Physical Human-Robot Interaction for Grasping in Augmented Reality via Rigid-Soft Robot Synergy
Using an AR headset, users can interact with a simulated model of the robotic system integrated into a general-purpose physics engine, which is superimposed on the real system, allowing simulated execution prior to real-world deployment.
Funding: Funding comes from SMART, M3S.

Physical Human-Robot Interaction for Grasping in Augmented Reality via Rigid-Soft Robot Synergy
5. A Compact Foldable Modular Design with Large Deformation and Force Application
In this work, we proposed a modular design base on the revision of a commonly used parallel mechanism in origami robot named Canfield Joint. By deflecting the linkages, we obtained a 56% increasement of the workspace of module and 50% reduce of footprint. By assembling two modules together, the robot can push away 2.5kg obstacles and doing pick and place task.
Funding: This work is supported by he National Research Foundation (NRF), Prime Minister’s Office, Singapore under its Campus for Research Excellence and Technological Enterprise (CREATE) programme. The Mens, Manus, and Machina (M3S) is an interdisciplinary research group (IRG) of the Singapore MIT Alliance for Research and Technology (SMART) centre

A Compact Foldable Modular Design with Large Deformation and Force Application
6. Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping:
Conventional fluid-driven soft grippers rely on external sources, limiting portability and autonomy. This work presents a self-contained, fixed-size gripper that operates via internal liquid redistribution among three bistable chambers. Contact-induced deformation in the sensing chamber triggers snap-through of the grasping chambers, enabling stable, size-selective grasping without continuous energy input. Internal hydraulic feedback allows passive adaptation to object stiffness. This compact, source-free design enables lightweight, stiffness-adaptive manipulation for targeted sampling in underwater and field environments.
Funding: DESTRO, REBOT, AI-driven soft robots for marine and unstructured environment
.png)
Source-Free Bistable Fluidic Gripper for Size-Selective and Stiffness-Adaptive Grasping:
1.Data-Driven Sensor Placement Optimization for a Multilayer Soft Robot Skin
We propose a geometric framework to optimize strain sensor placement. Using greedy selection, we achieve <5% error with a sparse topology of 4 sensors, significantly reducing wiring complexity.
Funding:AI-Driven Soft Robots for Marine and Unstructured Environments

Data-Driven Sensor Placement Optimization for a Multilayer Soft Robot Skin
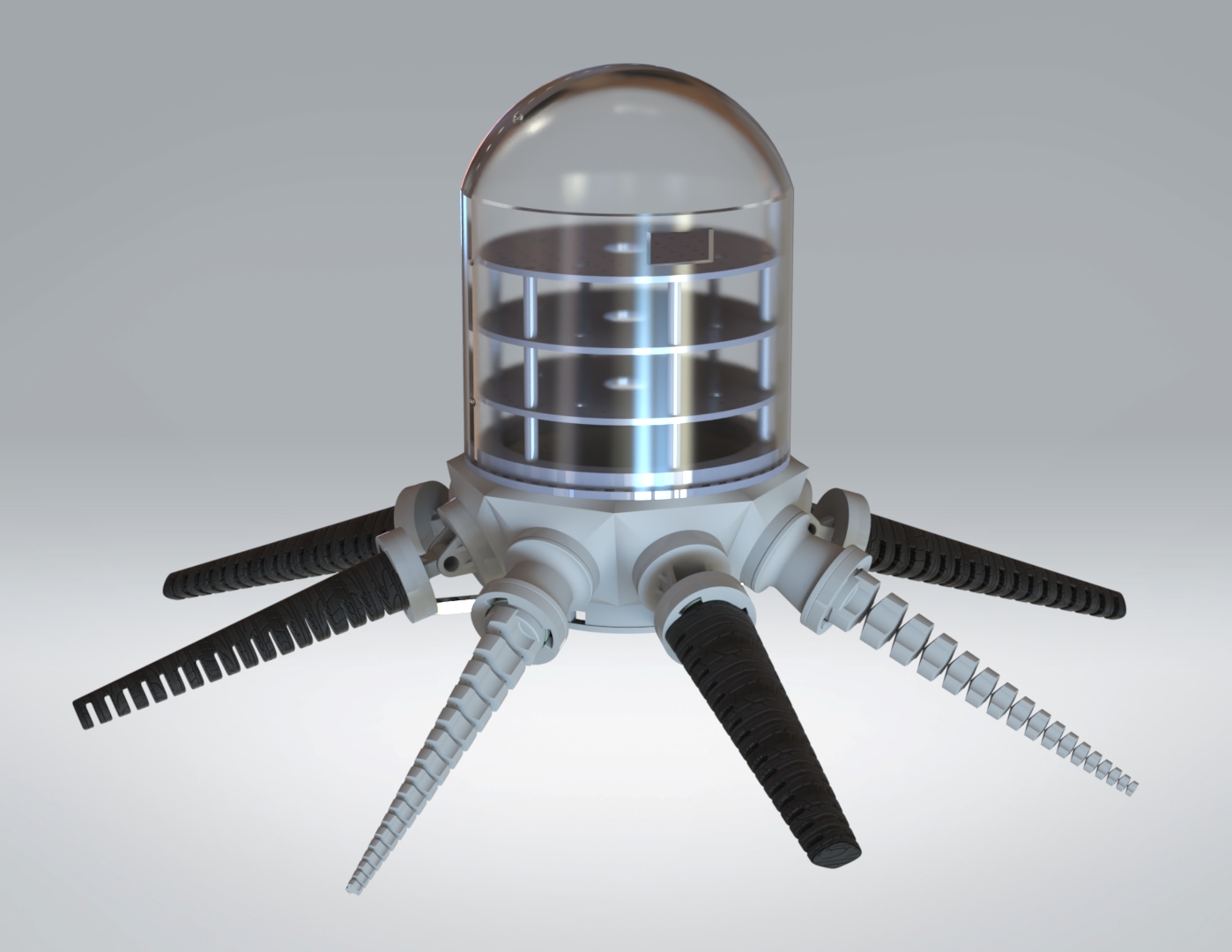
2. OpenOcto: A Modular, Open-Source Bionic Platform with Iris-Driven Propulsion and Soft Manipulation
OpenOcto is an soon-to-be open-source bionic platform combining an under-actuated, single-motor leg propulsion system with dexterous multi-degree-of-freedom soft arms.
Funding: AI-Driven Soft Robots for Marine and Unstructured Environments
OpenOcto: A Modular, Open-Source Bionic Platform with Iris-Driven Propulsion and Soft Manipulation
3. Liquid Metal Proprioception: Towards Independent Closed-loop Control for Soft Robots
A sensing mechanism, based on liquid metal GALINSTAN, is presented. A proprioceptive model is trained and employed within reinforcement learning to control a soft robotic arm.
Funding:AI-Driven Soft Robots for Marine and Unstructured Environments AND Meta learning project.

OpenOcto: A Modular, Open-Source Bionic Platform with Iris-Driven Propulsion and Soft Manipulation